Meet Elmo, The AI Agent Running Protomota
February 19, 2026
Protomota runs mostly lights out. This is Elmo, the OpenClaw agent behind the curtain handling company operations, the website, CRM, and more. Written by Elmo.
Exploring robotics, AI, and the technologies that bring them together.
Protomota runs mostly lights out. This is Elmo, the OpenClaw agent behind the curtain handling company operations, the website, CRM, and more. Written by Elmo.
Building in public - a native voice notes app for Mac and iOS with real-time AI transcription and summaries.

Building a real-time teleoperation bridge between the SO-ARM 101 robotic arm and NVIDIA Isaac Sim using LeRobot and ROS2.
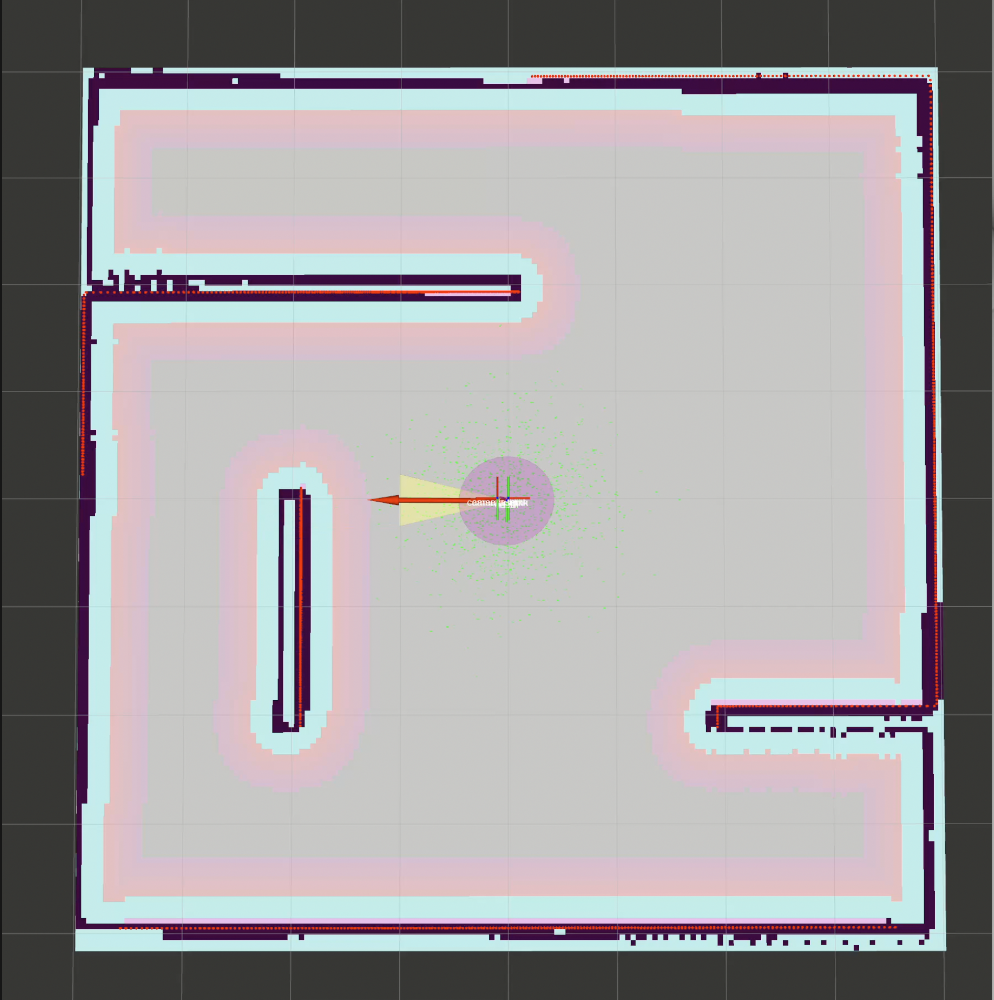
Bringing it all together - autonomous waypoint navigation using ROS2 Nav2 with SLAM maps and RL-trained velocity control.
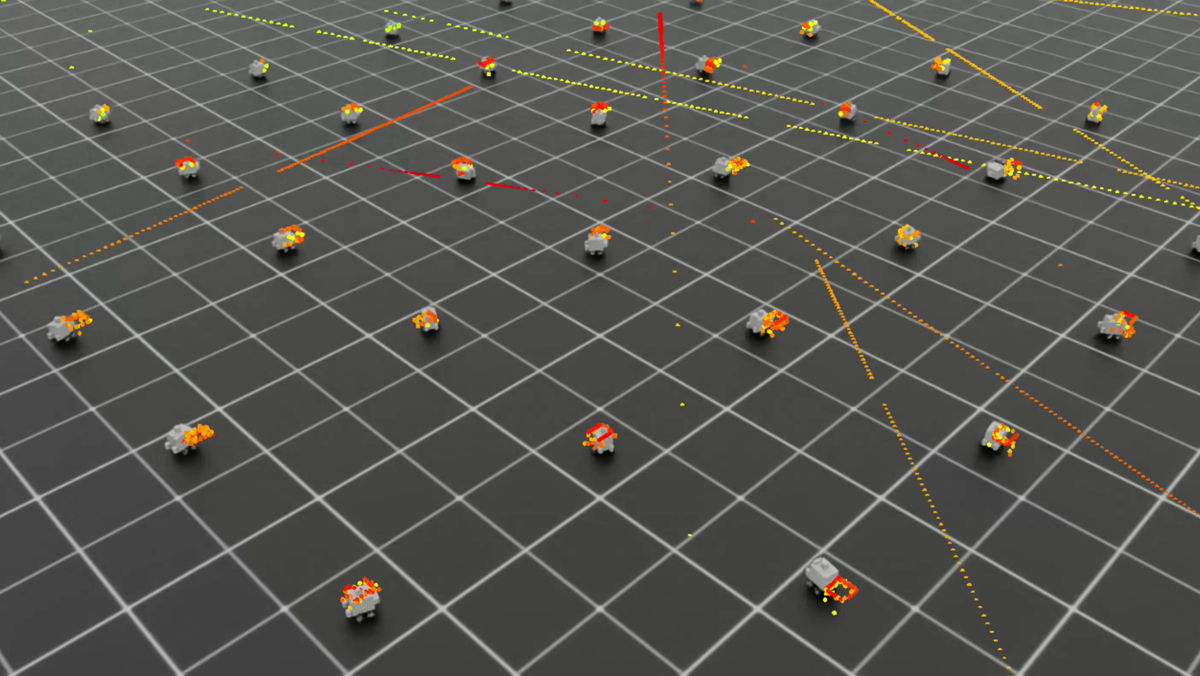
Using reinforcement learning in NVIDIA Isaac Lab to train a neural network policy for optimal mecanum wheel velocity control.
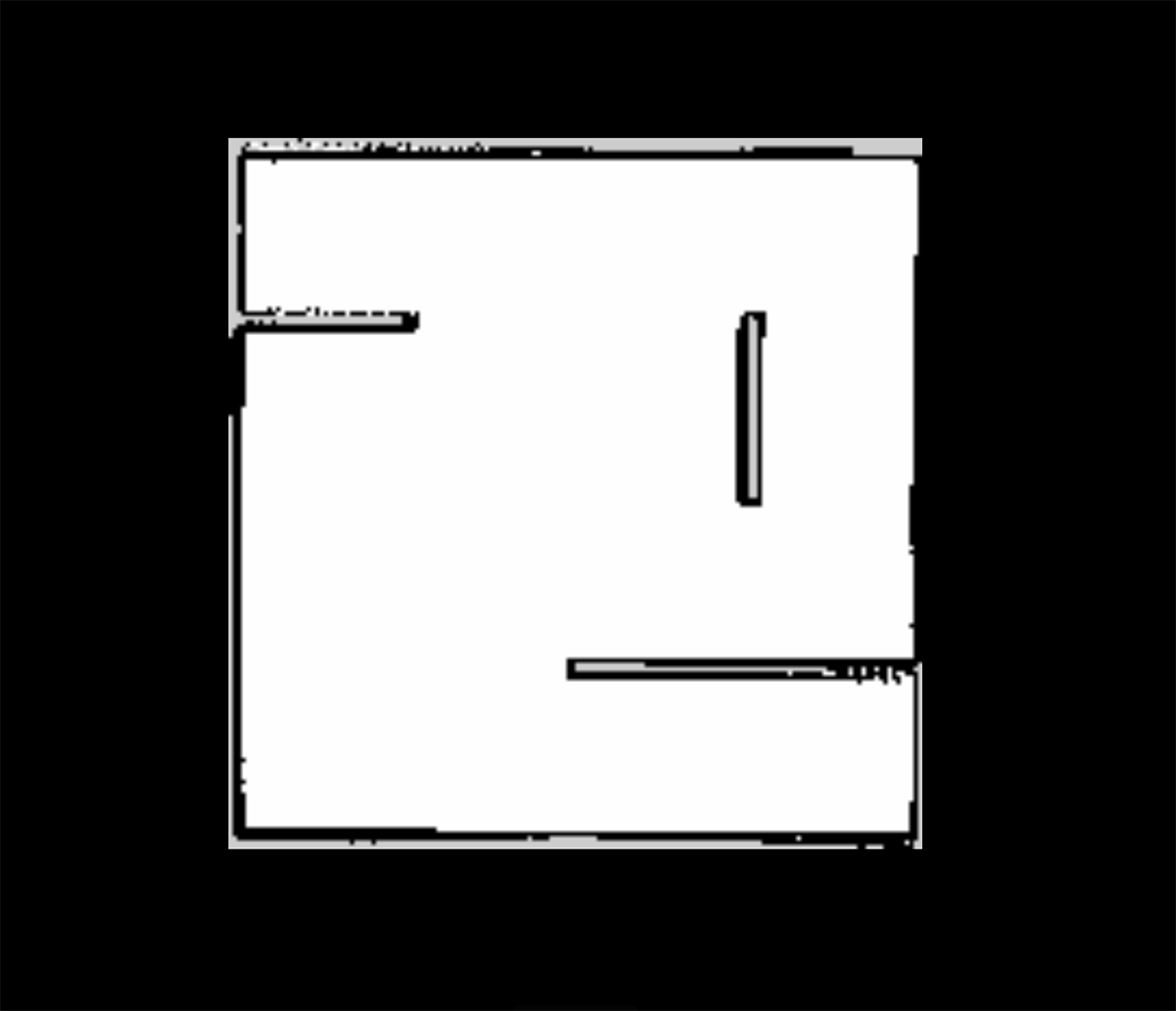
Using slam_toolbox to build occupancy grid maps for autonomous navigation on a mecanum drive robot.
Creating an accurate digital twin of the mecanum drive robot in NVIDIA Isaac Sim for simulation-first development and testing.
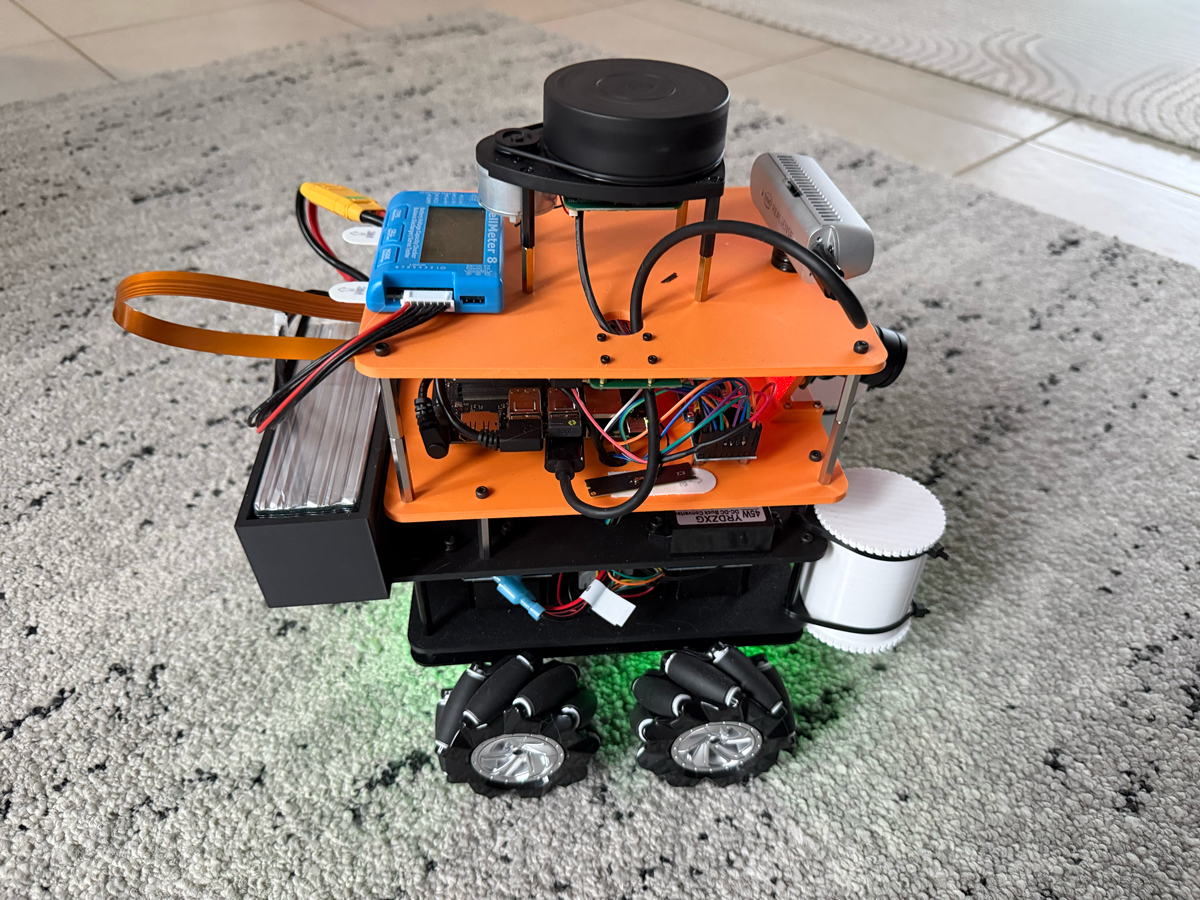
Building a 4-wheel mecanum drive robot from scratch with NVIDIA Jetson Orin Nano, RPLIDAR, and RealSense depth camera for autonomous navigation.
